Al sinds 1966 is het familiebedrijf Amberg een innovatieve speler op het gebied van (tunnel) engineering en landmeetkunde. Een van haar voornaamste en meest toonaangevende producten voor de spoorwegen is de GRP system FX meetoplossing.
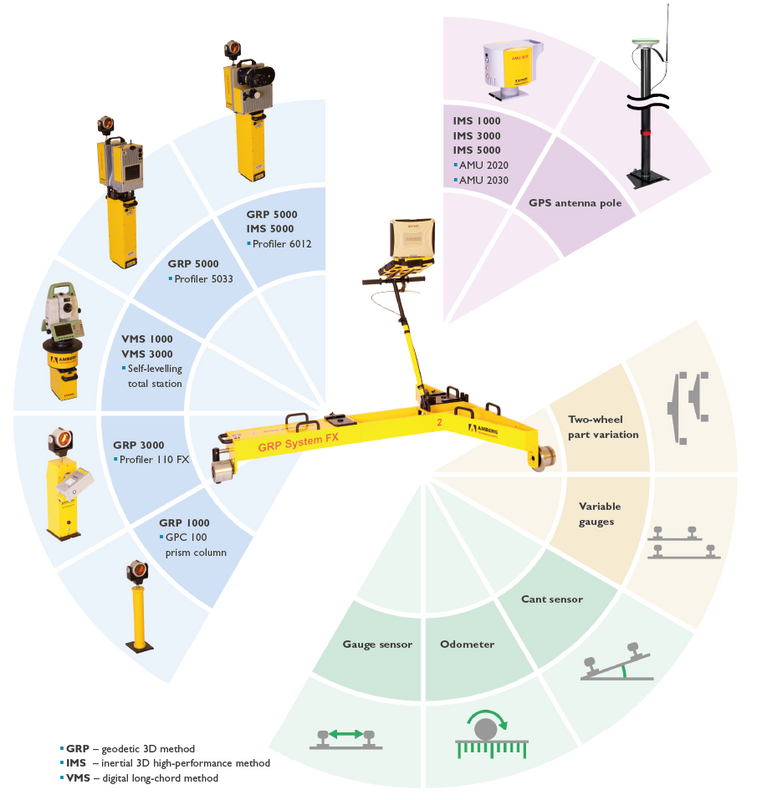
De GRP FX is een modulair systeem waarmee in diverse opstellingen vrijwel alle data rondom spoorgeometrie en scans in en rond het spoor tot op de millimeter nauwkeurig in kaart kunnen worden gebracht. Met de bijbehorende Amberg Rail-software kunnen de metingen worden voorbereid, uitgevoerd, geanalyseerd en verwerkt worden. Met deze data kunnen er bijvoorbeeld…
- …rapporten worden opgesteld, ter beoordeling van een spoorbeheerder (Amberg Survey)
- …onderstopwerkzaamheden worden uitgevoerd, waarbij de landmeter zelfs vlak voor de onderstopmachine kan meten (Amberg Tamping)
- …nieuwe sporen worden gebouwd, waarbij ook betonsporen mogelijk zijn (Amberg Slab Track)
- …gecombineerd met een laserscanner kan de directe omgeving rond het spoor in kaart worden gebracht, om bijvoorbeeld het Profiel van Vrije Ruimte in kaart te brengen (Amberg Clearance)
IMS 1000 en IMS 3000
Amberg Technologies begon in 2012 met de ontwikkeling en integratie van IMU (Inertial Measurement Unit)-technologie voor de GRP FX-meetsystemen. De technologie werd vervolgens in 2015 wereldwijd gelanceerd in de IMS-meetsystemen, die gebruik maakten van de hoogwaardige AMU 1030. De technologie achter de IMU kent zijn oorsprong voornamelijk uit militaire toepassingen; dergelijke systemen worden bijvoorbeeld ook gebruikt in onderzeeërs om, wanneer de onderzeeër diep onder water geen verbinding kan maken met een GPS-satelliet, toch nauwkeurig te kunnen navigeren.
Waar met de meer traditionele meettrolleys zoals de GRP-systemen een Total Station wordt gebruikt om de veranderingen in positionering van het systeem te traceren, neemt bij de IMS-systemen de IMU deze taak over. De IMU, die is opgebouwd uit 3 gyroscopen, 3 accelerometers en een krachtige ingebouwde rekenchip, kan uiterst nauwkeurig het afgelegde traject tussen twee controlepunten meten terwijl daartussen simpelweg met een vlot tempo gelopen kan worden. De positionering bij de controlepunten wordt ingemeten door een Total Station of een Profiler (laser-disto). Hierbij moet worden opgemerkt dat de IMU een bepaalde afwijking of drift krijgt, die oploopt naarmate de gelopen afstand. Terugkijkend naar de toepassing van IMU-technologie in onderzeeërs: deze drift is de reden waarom deze indrukwekkende machines periodisch boven water moeten komen. Er wordt op die momenten een meting gemaakt van de huidige positie via GPS, om zo te voorkomen dat men de verkeerde kant op vaart.

Een IMU die gebruikt wordt in onderzeeërs zoals de USS Alabama
(Bron: National Air and Space Museum, Smithsonian Institution)
Daarom wordt aanbevolen om met het meten met de IMS-systemen de afstand tussen de bekende controlepunten in het spoor beperkt te houden. De te verwachten nauwkeurigheid met de AMU 1030 is te zien in de onderstaande tabel:

| Nauwkeurigheid | Interval controlepunten |
| +/- 1 mm | < 60 m |
| +/- 2 mm | < 120 m |
| +/- 5 mm | < 300 m |
Nieuwe generatie IMU’s en GNSS
In 2018 introduceerde Amberg Technologies een nieuwe familie van IMU-modules. Waar voorheen enkel de AMU 1030 beschikbaar was, in essentie de meest geavanceerde en nauwkeurige IMU van Amberg Technologies, is er nu een bredere keuze beschikbaar in de vorm van de AMU 2010, 2020 en 2030. De AMU 2030 is hierbij in specificaties nagenoeg hetzelfde als de voorloper, de AMU 1030. Om de investeringsdrempel lager te maken voor gebruikers die niet per se de hoogste nauwkeurigheid behoeven in hun metingen zijn de in aanschaf voordeligere AMU 2020 en 2010 geïntroduceerd.
De AMU 2020 biedt een oplossing die qua nauwkeurigheid tussen de AMU 2010 en 2030 in valt, en naar wens nog te upgraden is naar een AMU 2030 omdat deze gebruik maakt van dezelfde soort technologie als de AMU 2030. De AMU 2010, daarentegen, is een zogeheten MEMS (Micro-Electro-Mechanical Systems)-IMU en is daarom niet te upgraden naar een hierboven gepositioneerd model. Deze MEMS-technologie biedt echter een groot voordeel op het gebied van grootte en gewicht van de IMU; een IMS Tamping 2010 systeem weegt slechts 29,5 kg tegenover een systeemgewicht van +/- 45 kg voor een IMS 2030/2020-systeem.

In de onderstaande tabellen zijn de te verwachten nauwkeurigheden van de diverse soorten AMU’s te vinden:

| Nauwkeurigheid (1 sigma) | Interval controlepunten |
| +/- 1 mm | < 60 m |
| +/- 2 mm | < 120 m |
| +/- 5 mm | < 300 m |

| Nauwkeurigheid (1 sigma) | Interval controlepunten |
| +/- 2 mm | < 60 m |
| +/- 4 mm | < 120 m |
| +/- 12 mm | < 300 m |
| Nauwkeurigheid (1 sigma) | Interval controlepunten |
| +/- 3 | < 60 |
| +/- 6 | < 120 |
| +/- 20 | < 300 |
Sinds 2019 is het tevens mogelijk om, net als de GRP-systemen, ook de IMS-trolleys te voorzien van een Global Navigation Satellite System (GNSS). GNSS is een verzamelnaam voor diverse radionavigatiesystemen, waaronder ook het bekende GPS-systeem valt. Met GNSS kunnen er nieuwe controlepunten gecreëerd worden in trajecten waar deze controlepunten nog niet bestaan, wat het mogelijk maakt om ook in deze trajecten absolute metingen uit te voeren. Dit alles maakt dat er met de flexibele IMS 1000- en 3000-systemen een meetsnelheid van tot wel 4,5 km/h gerealiseerd kan worden; grofweg tweemaal zo snel als de GRP-systemen. Een bijkomend voordeel van de IMS-systemen is het feit dat het gehele systeem dankzij de effectieve en gestroomlijnde werkwijze gebruikt kan worden door één persoon, waar met andere systemen tot wel 4 paar handen nodig was om, bijvoorbeeld om het Total Station te verplaatsen. Dit bekent dat het gebruik van een IMS-systeem een kostenreductie voor metingen in het spoor van tot wel 90% met zich meebrengt, vergeleken met andere systemen.
IMS 5000
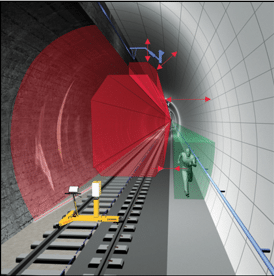
Het spoor kent voor een spoorvoertuig enkele mogelijke obstakels, bijvoorbeeld in de vorm van tunnels, (boven)leidingen, bomen en perrons. Gezien voertuigen natuurlijk voldoende ruimte en comfort moeten bieden voor de reizigers, is het inmeten van de omgeving erg belangrijk.
Om een nauwkeurige scan te maken van de omgeving en met deze data een (dynamische) analyse te maken voor diverse soorten voertuigen, hebben wij de IMS 5000 in ons assortiment. Deze trolleys zijn naast de IMU uitgerust met een laserscanner waarmee 3D-puntenwolken kunnen worden gemaakt in het spoor, met snelheden van wel meer dan 1.000.000 punten per seconde. De nieuwe 5016-scanner kan zelfs los van de trolley ingezet worden voor scanwerkzaamheden buiten het spoor.

Keuze voor IMS 5000 door Infrabel
Een van de krachten van de IMS 5000 is de mogelijkheid om er in één sessie zowel de omgeving als de spoorgeometrie mee in kaart te brengen. Daarom kiezen steeds meer klanten voor een dergelijke oplossing, om zo het streven van de verandering van reactief naar proactief onderhoud te ondersteunen. Zo heeft ook Infrabel besloten om haar bestaande GRP-systemen te upgraden naar IMS 1000, 3000 en 5000. Infrabel ziet grote kansen met IMS wegens de grote winst in meetsnelheid en zal deze systemen inzetten om het tot de nieuwe standaard te vormen.